https://big5.sputniknews.cn/20231129/1055335729.html
中國空間站全貌高清圖像首次公佈
中國空間站全貌高清圖像首次公佈
俄羅斯衛星通訊社
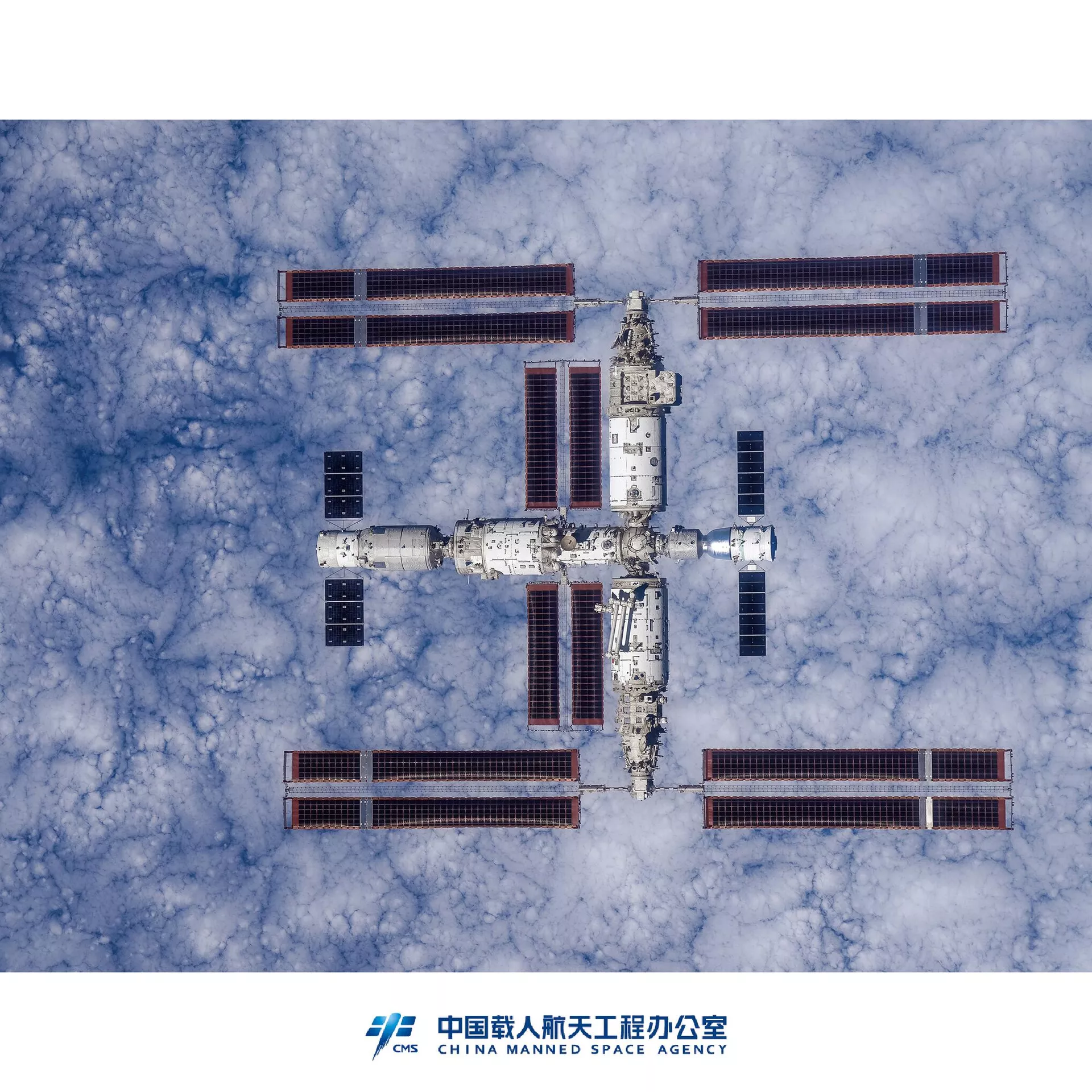
11月28日,中國載人航天工程辦公室發佈了中國空間站組合體全貌的高清圖片,這是中國首次在軌獲取以地球為背景的空間站組合體全貌圖像,也是中國空間站的第一組全構型工作照。 2023年11月29日, 俄羅斯衛星通訊社
2023-11-29T08:20+0800
2023-11-29T08:20+0800
2023-11-29T08:22+0800
中國
空間站
航天
拍攝
https://cdn.sputniknews.cn/img/07e7/0b/1d/1055335330_150:317:2782:1798_1920x0_80_0_0_345ef449a1a2e805173c40313d2763db.jpg.webp
北京時間2023年10月30日20時37分,神舟十六號載人飛船與空間站組合體成功分離。分離後,神舟十六號航天員手持高清相機,通過飛船繞飛完成了以地球為背景的空間站組合體全景圖像拍攝。要拍攝空間站,最好的視角是在空間站上方,這個視角有別於此前飛船相機拍攝的同一平面的全景,能夠更好地展示空間站的全貌。要去到這個合適的位置,神舟十六號載人飛船首先從空間站徑向對接口分離撤離至200米停泊點,然後利用繞飛的“絕活”,飛至空間站前方停泊點,再從前方停泊點繞飛至後方停泊點,而拍攝的時機就選擇在從空間站前方向後方繞飛過程當中。中國載人航天工程辦公室介紹,繞飛拍攝過程使用了飛船返回艙的舷窗。在飛船正常姿態飛行下,舷窗是分布在返回艙的左右兩側,以此姿態飛越空間站時,航天員是不能從舷窗中拍攝空間站的,因此要想找到合適的拍攝角度,飛船必須進行一個滾動姿態調整,讓舷窗變成一上一下,通過下方舷窗進行拍攝,這就需要“太空全能舵手”——神舟飛船的制導導航與控制(GNC)系統大顯身手。也就是說,在分離撤離過程中,飛船姿態在垂直下方至前方繞飛時轉為倒飛,前方至後方繞飛時飛船轉為正飛,同時滾動90度調姿,以這個姿態掠過空間站進行拍攝,到達空間站後方時,姿態恢復正常,並施加一個反向的撤離脈衝,最終遠離空間站。
https://big5.sputniknews.cn/20230530/1050713195.html
俄羅斯衛星通訊社
feedback.cn@sputniknews.com
+74956456601
MIA „Rossiya Segodnya“
2023
俄羅斯衛星通訊社
feedback.cn@sputniknews.com
+74956456601
MIA „Rossiya Segodnya“
News
cn_CN
俄羅斯衛星通訊社
feedback.cn@sputniknews.com
+74956456601
MIA „Rossiya Segodnya“
俄羅斯衛星通訊社
feedback.cn@sputniknews.com
+74956456601
MIA „Rossiya Segodnya“
中國, 空間站, 航天, 拍攝
中國空間站全貌高清圖像首次公佈
2023年11月29日, 08:20 (更新: 2023年11月29日, 08:22) 11月28日,中國載人航天工程辦公室發佈了中國空間站組合體全貌的高清圖片,這是中國首次在軌獲取以地球為背景的空間站組合體全貌圖像,也是中國空間站的第一組全構型工作照。
北京時間2023年10月30日20時37分,神舟十六號載人飛船與空間站組合體成功分離。分離後,神舟十六號航天員手持高清相機,通過飛船繞飛完成了以地球為背景的空間站組合體全景圖像拍攝。
要拍攝空間站,最好的視角是在空間站上方,這個視角有別於此前飛船相機拍攝的同一平面的全景,能夠更好地展示空間站的全貌。要去到這個合適的位置,神舟十六號載人飛船首先從空間站徑向對接口分離撤離至200米停泊點,然後利用繞飛的“絕活”,飛至空間站前方停泊點,再從前方停泊點繞飛至後方停泊點,而拍攝的時機就選擇在從空間站前方向後方繞飛過程當中。
中國載人
航天工程辦公室介紹,繞飛拍攝過程使用了飛船返回艙的舷窗。在飛船正常姿態飛行下,舷窗是分布在返回艙的左右兩側,以此姿態飛越空間站時,航天員是不能從舷窗中拍攝空間站的,因此要想找到合適的拍攝角度,飛船必須進行一個滾動姿態調整,讓舷窗變成一上一下,通過下方舷窗進行拍攝,這就需要“太空全能舵手”——神舟飛船的制導導航與控制(GNC)系統大顯身手。
也就是說,在分離撤離過程中,
飛船姿態在垂直下方至前方繞飛時轉為倒飛,前方至後方繞飛時飛船轉為正飛,同時滾動90度調姿,以這個姿態掠過空間站進行拍攝,到達空間站後方時,姿態恢復正常,並施加一個反向的撤離脈衝,最終遠離空間站。







 京公網安備11010502053235號
京公網安備11010502053235號
{kind=link}
{kind=link}
{kind=link}